







 29 / 92
29 / 92

mode, there will be a full manual control
option – indeed, the company is using
a standard short-range line-of-sight
system in the flight test programme. This
is a 5-10 km set-up, de Villiers says, with
custom options for longer range missions.
The system includes an antenna tracking
base station in a single-operator Pelican
case with a built-in screen.
“Right now, for long-range data
telemetry, we are using 800/900 MHz
and are looking at encrypted data links
for higher end clients who need them,”
he says.
Alti is considering providing a standard
data link for command and control and
video, but which again can be tailored to
customer needs in terms of characteristics
such as the frequencies used.
The ground control station (GCS) itself is
another area in which the company is still
considering its options. The software will
be a custom version of the QGC system
outlined above, while the hardware could
be supplied by Hungarian company
Horus, which makes and customises a
range of military flight cases, GCSs and
antenna tracking systems.
“We will offer a range of GCSs, and
the client can also add onto the system
as required,” de Villiers says. “Our
29
UAV development platform.
“PX4 has the potential to become the
backbone of the rapidly growing drone
industry,” says Lorenz Meier, the doctoral
computer science student at ETH Zurich,
who initially created the software. “The
PX4 software will be to drones what
Android is to many smartphones.”
PX4 is already in use aboard thousands
of small UAVs, says ETH Zurich, and
Meier argues that the partnership with
Qualcomm will extend it to the next
generation of unmanned vehicles, which
will be capable of completing far more
complex tasks and avoiding obstacles, so
the software’s range of functions is being
constantly enhanced.
As open source software, PX4’s
source code is freely available, and
any unmanned vehicle manufacturer
can tailor it to their own needs, as
smartphone manufacturers can with
Android, adding their own apps such
as camera controllers. It enables UAVs
to take off and land autonomously and
follow moving targets, for example.
Open source ground control
PX4 works with the QGroundControl
(QGC) mobile and desktop interface
software used to configure the system
and execute missions. Again initiated and
largely developed by Meier, QGC is also
open source software that also supports
open standards and provides full ground
station support to the PX4 flight stack and
MAVLink data links, and runs on Windows,
OS X, Linux and Android tablets.
QGC provides 2D and 3D aerial maps
with drag-and-drop waypoints, and
supports Google Earth. It also allows
in-flight manipulation of waypoints and
vehicle parameters via an EEPROM chip,
supports real-time plotting of sensor and
telemetry data and plotting of sensor logs.
It also supports the Universal Datagram
Protocol (UDP), serial radio modem and
mesh networks, and multiple autopilot
types in addition to PX4-based systems.
The MAVLink protocol supports up to 255
vehicles in parallel and allows custom
messages to be added.
PX4 also features several customisable
software packages including obstacle
detection and avoidance that links to the
flight control package, along with visual
inertial odometry, mapping, planning,
simulation and virtual flight testing.
“PX4 offers reliability, features, ease
of use and so on at a favourable price
point compared with other
s
ystems,”
says de Villiers. “I can’t think of any real
drawbacks with a PX4-based system for
our platform or applications. Clients have
the option to integrate payloads with the
autopilot, write custom code and more.”
Alti has developed its own flight control
algorithms with the help of a team of
software engineers based in Switzerland.
GNSS options
The company continues to look at
different GNSS options for integration
with the flight control system and,
because the UAVs are used all over the
world, solutions are likely to involve multi-
GNSS receivers. However, they are also
likely to be customer dependent, with
de Villiers emphasising that comms will
be tailored to the requirements of the
customer and the payload.
While most missions are likely to be
flown in pre-programmed autonomous
Unmanned Systems Technology
| June/July 2016
Alti Transition
|
Dossier
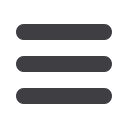
Integrated into the fuselage, the petrol engine drives
the propeller directly and is fixed to the composite rear
bulkhead using elastomeric anti-vibration mounts