







 48 / 92
48 / 92

48
Show report
|
AUVSI’s Xponential
14,000 rpm with no failures, while most
customer applications call for 6000-9000
rpm.
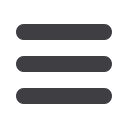
Omnetics makes wiring for
unmanned
vehicles, and Bob Stanton
told us that the latest trend is for so-
called ‘hybrid’ cables and connectors
that run signal and power lines together.
This is to reduce the space taken up
and, more important, the weight of the
wiring on a vehicle, taking advantage of
the reduced current requirements of the
latest chip technology.
“The connectors can be right down
to ‘Micro’ 1.27 mm pitch and ‘Nano’
0.635 mm pitch sizes,” Stanton explained.
“We are now running signal and power
pins side by side in these, so you have
only one cable and one connector
where before you had two. In addition to
shielding for the power and signal lines
we have had to introduce differential
signal processing to enable us to use
a hybrid cable for high-speed digital
equipment such as surveillance cameras
and GPS data processing.”
Stanton also noted that, more and
more often, the miniature hybrid
connectors use the latching type
rather than the traditional jack screw
connection. “The latest technology
cam and spring latch matches the
performance of the MIL-SPEC jack
screw connection and allows for quicker
and easier switching of modules in the
field.”
Uvionix’s Alpha project to develop
a pair of small, internet-connected
electric UAVs for utility inspection
and commercial package delivery is
on schedule to be ready in 2017, the
company’s Boris Iskrev told
UST
at the
show.
Both applications require a high
degree of inherent safety around
equipment and people, and Iskrev
was keen to emphasise the layers of
redundancy and remote supervision
integrated into the autonomous, 8 lb,
27 in diameter aircraft, which is designed
to carry a payload of up to 2 lb, fly for
up to 80 minutes and cover a six-mile
return-mission radius.
The Alpha multi-purpose aerial
platform should be ready at the
beginning of next year, he said, while
the delivery vehicle and the ‘ecosystem’
that supports the delivery service is
set to follow by mid-year, ahead of any
favourable decision by the US FAA on
easing the stipulation that commercial
UAVs must remain within line of sight of
the pilot and observer.
The platform’s two rotors are coaxial
and counter-rotate inside a protective
shroud, and each is driven by its own
neodymium permanent magnet motor
and powered by a high power-density
lithium-based battery based on a
commercially available chemistry that
Iskrev says is new to UAVs.
Four control surfaces attached to
cross-pieces underneath the rotor can
generate roll, pitch and yaw forces,
although yaw is normally controlled with
torque reaction from differential rotor rpm.
This unusual configuration led Uvionix
to develop its own autopilot software and
two controllers, the first being a real-time
system to stabilise and manoeuvre the
vehicle, the second to communicate over
the internet with the control centre and
perform more complex algorithms such
as visual pattern matching to find landing
sites autonomously.
The company developed the second
controller using an NVIDIA Jetson TX1
embedded platform. The controller
June/July 2016 |
Unmanned Systems Technology
Omnetics’ range of hybrid’ connectors
run power and signal lines together