







 76 / 92
76 / 92

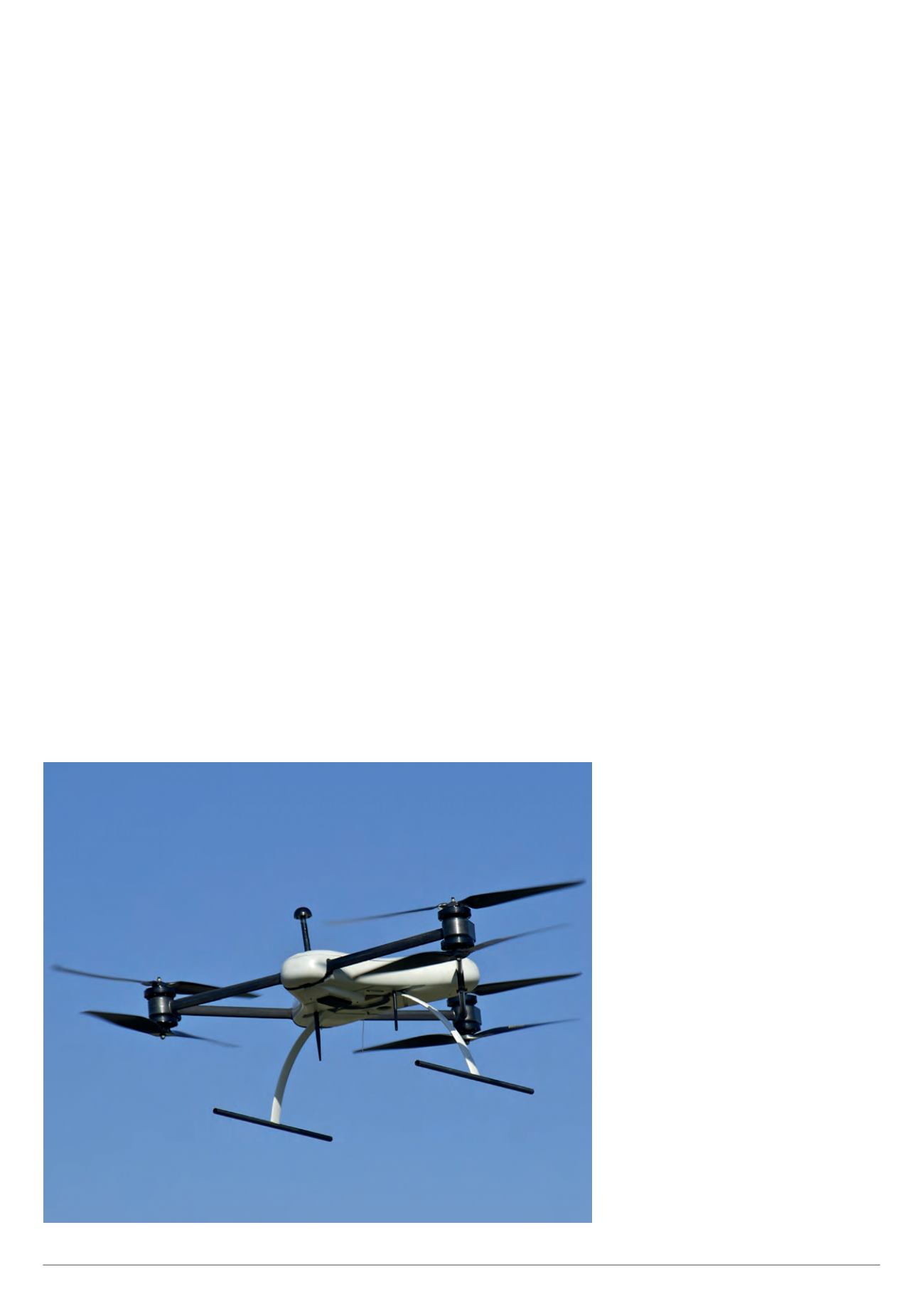
Using fuel cell technology to triple the flight
time of the Da Vinci rotary craft is being
considered (Courtesy of Flying Production)
76
airframe costs, and by having lower
mission and maintenance costs than
conventional platforms, which are
designed to operate for decades.
This approach is being extended
to other civilian applications such as
firefighting and disaster relief.
“Formation flight and swarming
is something we have been doing
research and development on in a
number of places for some time,” says
McConville. “Mostly we’ve been using
firefighting and disaster relief as our
kind of scenario, but those algorithms
and control technologies are something
we’re very interested in and continue to
work on, and we believe will have an
impact on many different programmes
as we go forward.
“Imagine the ability to use different
types of aircraft and ground vehicles, as
mentioned earlier, in robotics, ground
vehicles, all together with autonomy
capabilities and the ability to move them
in formation, and to have them act in
the most efficient and effective manner
collaboratively. That just opens up a
whole range of new capabilities.”
Surveillance
Expertise in camera payloads naturally
lends itself to surveillance systems,
although the limited time in the air can
be a challenge, so Israeli UAV developer
Flying Production is looking to use fuel
cell technology to triple the flight time of
its Da Vinci rotary craft.
“The Da Vinci itself is designed for a
payload of up to 5.6 kg and can carry
a day and night camera, with dual EO
sensors and 3x optical zoom for users
looking to secure perimeters, maritime
observation applications or border
patrols,” says Ofir Zikry, the company’s
CTO and co-founder.
“It has its own navigation system on
the payload so you can pinpoint the
coordinates of the target you are looking
at. It’s a mathematical algorithm that
gives the coordinates of the camera, so
there is full integration between the UAV’s
navigation system and the camera. This
needs not just GNSS satellite navigation
but a full inertial accelerometer with
Kalman filter optimisation of all the
sensors, with the error correction from the
accelerometer done inside the autopilot.
“Another approach we are developing
is a fully autonomous system that
includes a wireless charging base
station with an all-weather design,”
says Zikry. “That allows the Da Vinci to
sit in hibernation mode without time or
weather limitation yet ready to go. We
got that need from protecting perimeters,
and it gives 30 s of readiness as you are
not shutting down the whole system; you
just put the key components into sleep
mode.”
This allows constant surveillance from
a series of autonomous craft that launch
from these wireless charging bases.
Electricity generation
Innovation in UAV technology is
opening up new application areas
such as power generation. Ampyx
Power is the first company to develop
an airborne wind energy system with
its PowerPlane, a tethered aircraft that
converts wind energy into electricity.
As the craft moves up and down in the
wind, the tether turns a turbine on the
ground to generate electricity.
“The Ampyx Power system represents
an exceptional design challenge,” says
Erik van der Heide, head of engineering
at Ampyx Power. “The aircraft can fly
completely autonomously – PowerPlanes
take off, fly and land autonomously from
a platform – by using an array of sensor
suites that provide the autopilot with
critical information to perform the task
safely. It is designed to spend unusually
long periods in the air – it can remain
airborne 24 hours a day seven days a
week if conditions are suitable, and is
designed for a service life of 20 years.”
A key piece of the control suite is the
LynxOS-178 avionics real-time operating
system. “Not only should the level of
reliability of our system be high, it needs
to be measurable and controllable as
well,” says van der Heide. “So we needed
a software platform that supports us in
achieving acceptance by the Federal
Aviation Authority [FAA], the European
Aviation Safety Agency [EASA] and other
relevant aviation authorities.
June/July 2016 |
Unmanned Systems Technology
Insight
|
UAVs